 문의 및 의뢰
문의 및 의뢰
 회사소개서
회사소개서
 kr
kr en
en

고속도로 암거 균열 및 각종 손상 측정장비

고속도로 암거 균열 및 각종 손상 측정장비
소프트웨어 개발
모니터링 시스템
영상분석 시스템
정밀 장비 개발
엔지니어링툴 개발
- - 고속도로 암거 균열 및 각종 손상 측정장비
- 제작 기간
- 작업 시기 : 2018. 05
- 제작사
- exPbiros
- 계약 방식
- 전체 외주 (전체 SW, HW, Application 디자인 포함, 기구물개발)
- 개발 언어
- Microsoft .Net Framework 4.5 (C# Application Server)
- 개발툴
- Microsoft Visual Studio 2013 sp1, Windows Server
프로젝트 상세설명
exPbiros
실제 찰영 동영상
로봇전체 구성도
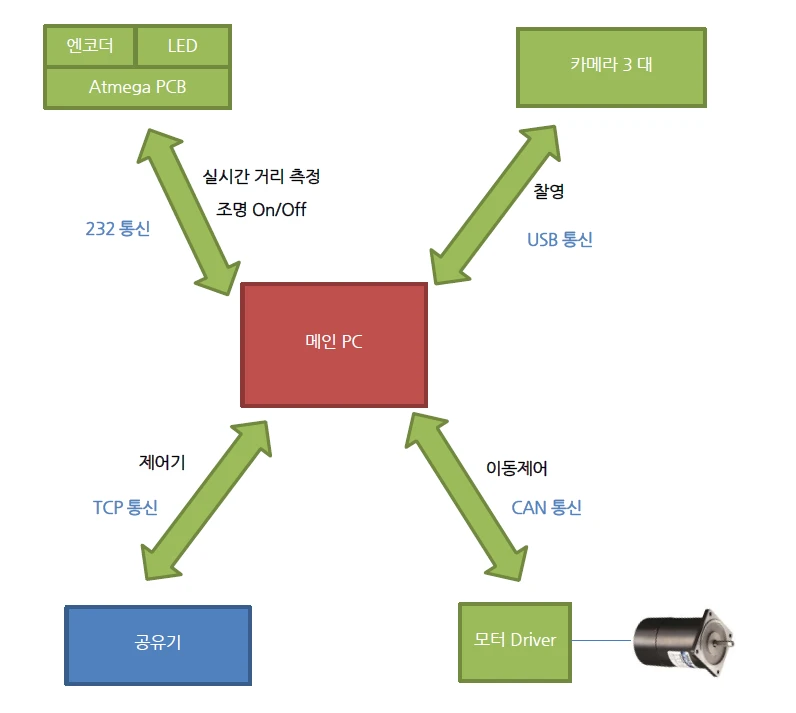
안드로이드 앱으로 로봇을 제어 하여 암거를 찰영 하는 시스템 입니다.
암거

로봇이 일정한 간격으로 유지하면서 찰영해야 합니다.
하드웨어 개발
PCB 제작
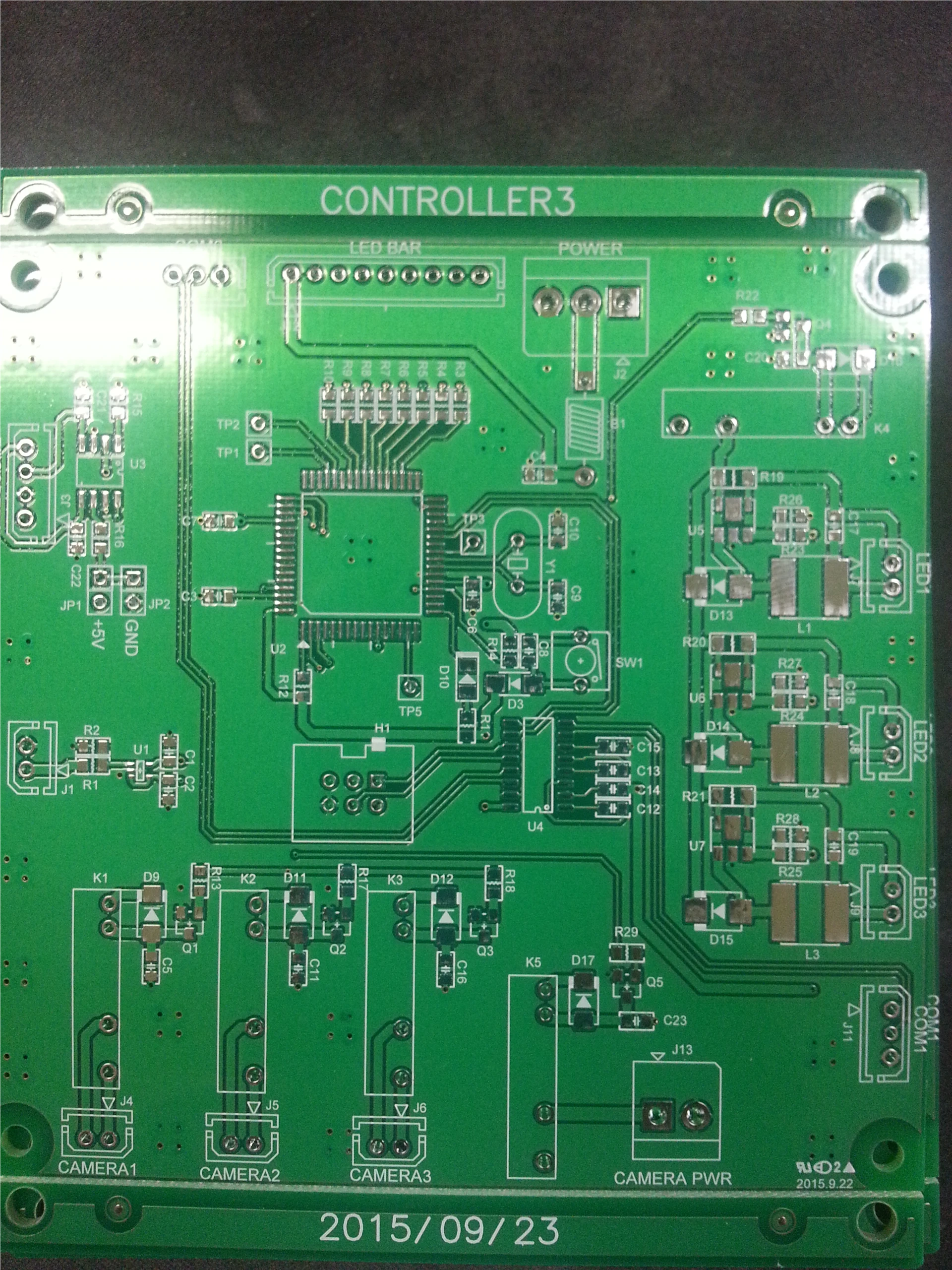
LED 제어 , 카메라 전원 제어 , 엔코더 제어 , 배터리 사용량 체크 기능
모터드라이브를 이용한 모터 제어(EC모터)
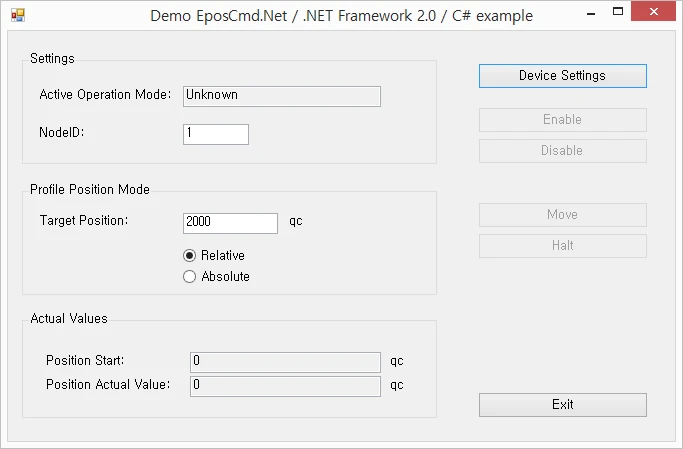
닷넷 기반의 모터 드라이브 SDK를 이용하여 모터를 제어 개발
카메라 제어
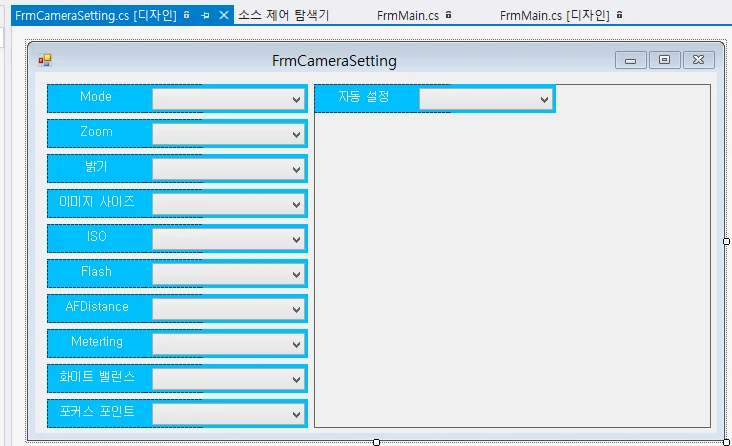
캐논 G9 / G10 카메라(현재단종)에서 지원하는 SDK를 이용하여 카메라 제어 개발
기구물 제작
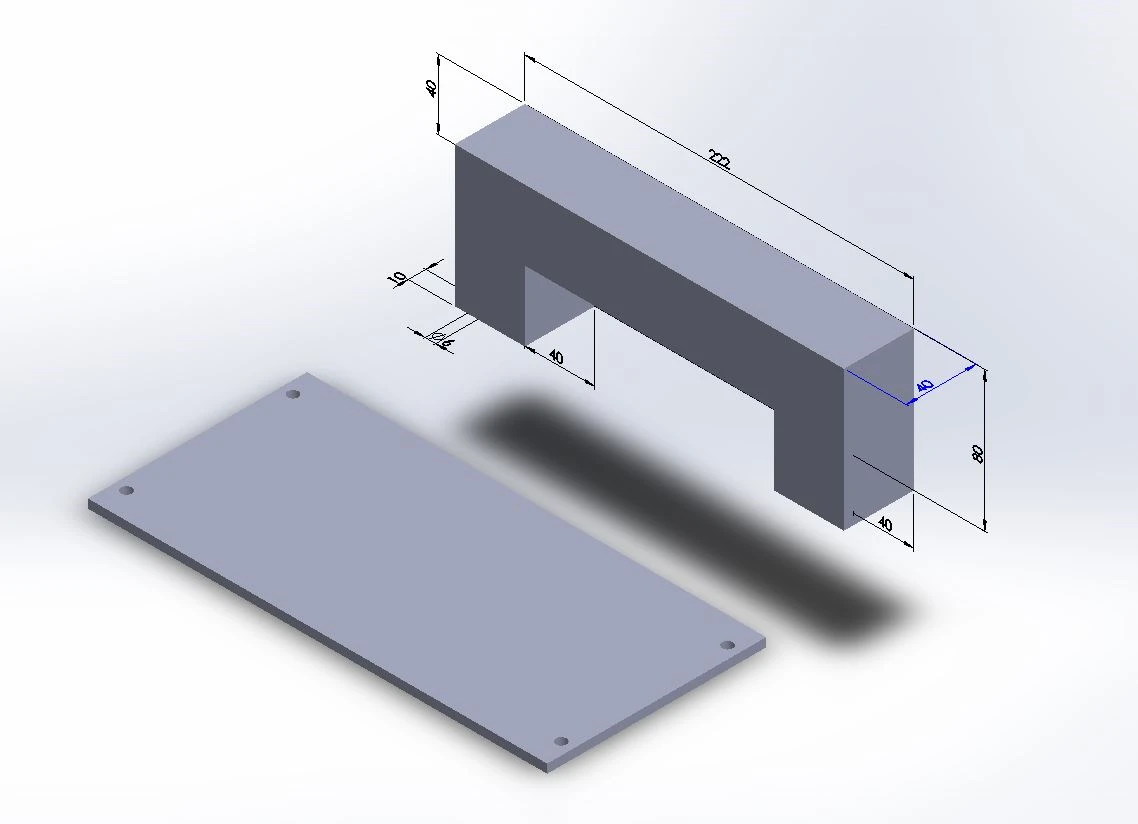



CAD 및 Solidwork 이용하여 기구물을 제작 합니다.
로봇 및 기구물 조립
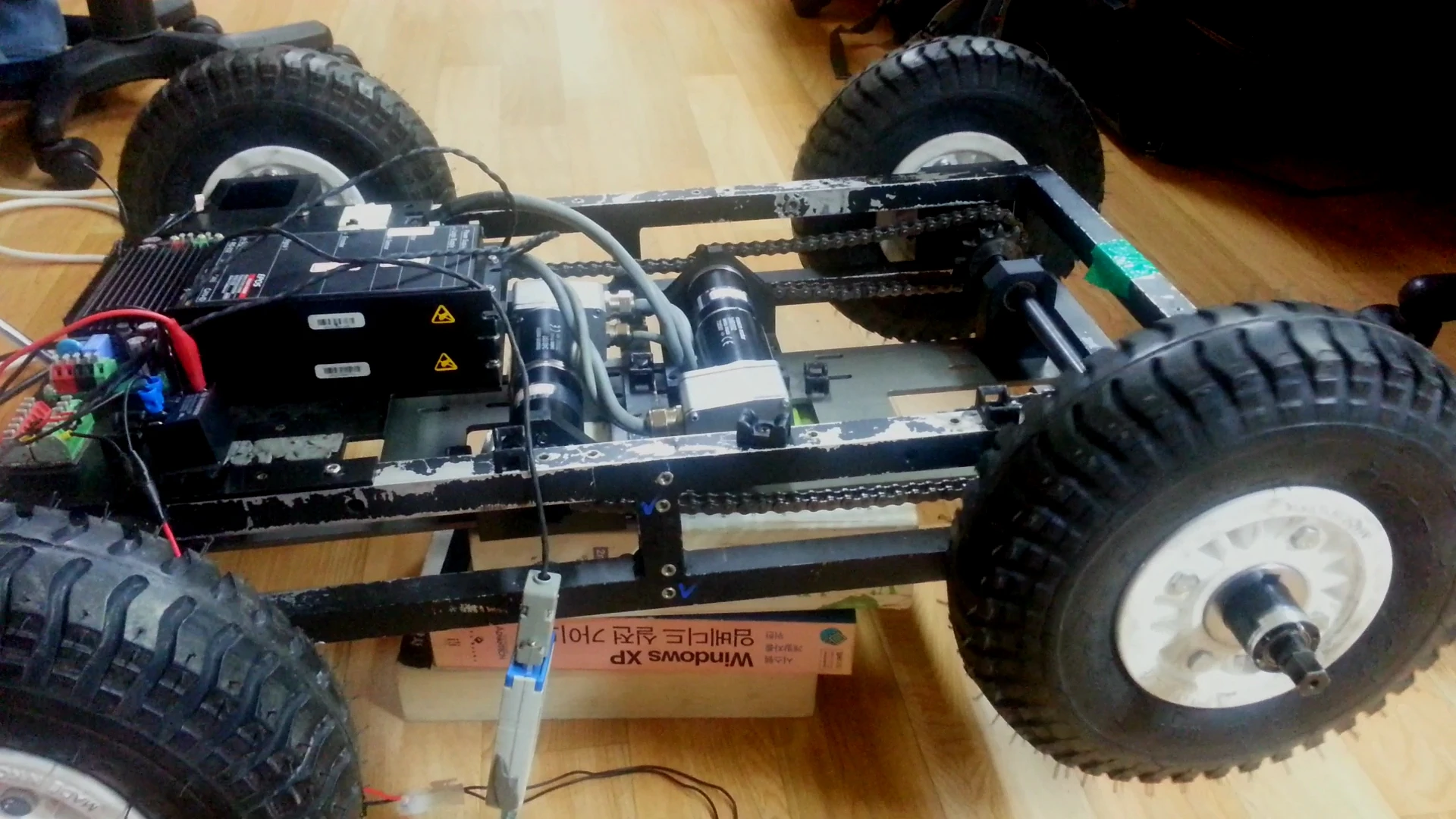
로봇
기구물을 조립하지 않은 상태의 로봇입니다.
기구물 조립
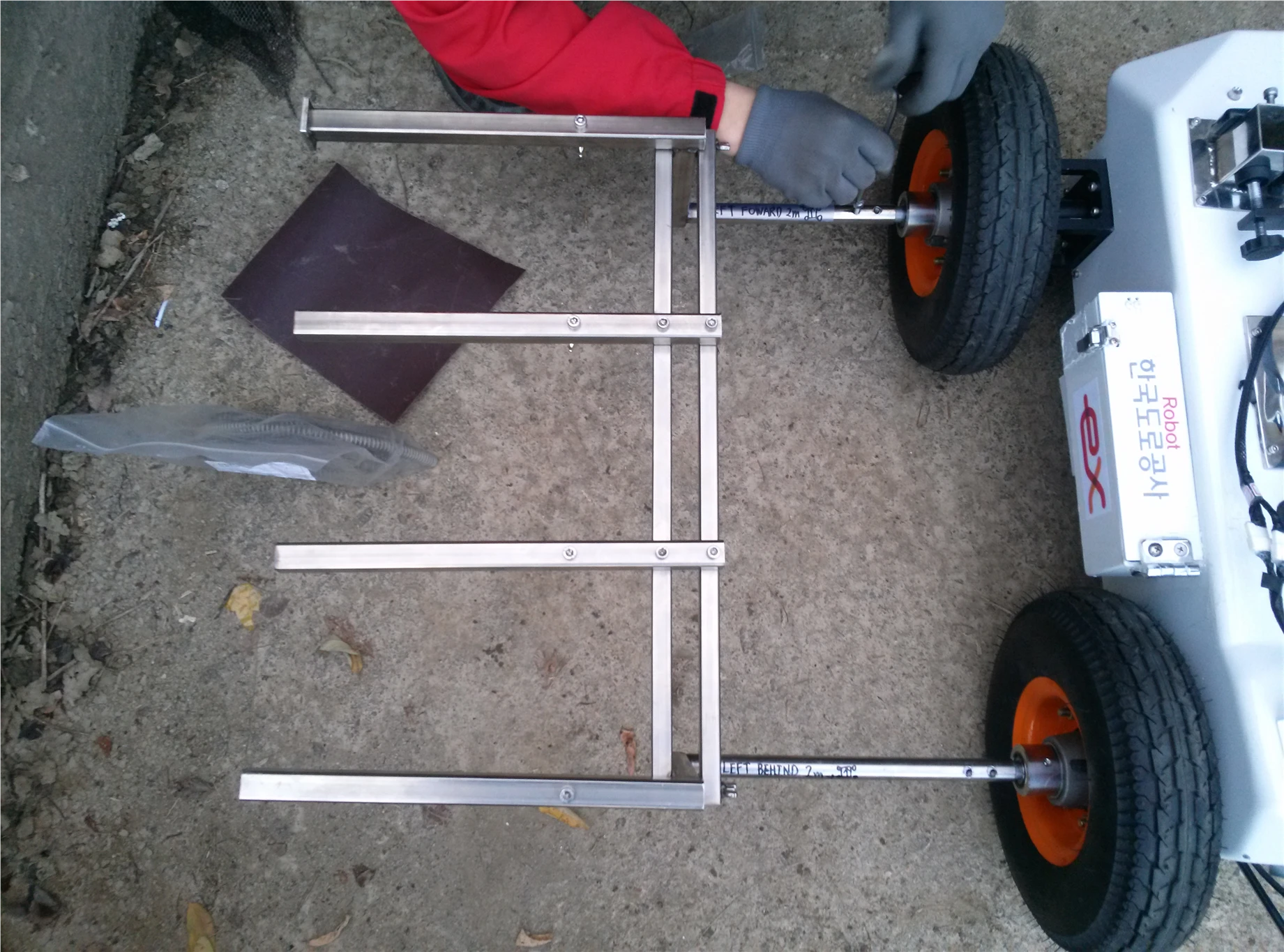
바퀴 중앙을 통과하여 나온 봉의 구멍에 맞춰 기구물을 조립하는 모습입니다.
용수철 넣기

조립한 기구물의 빈 공간에 용수철을 넣습니다.
바퀴 넣기

용수철을 넣은 곳에 바퀴를 조립합니다.
카메라 고정봉 조립

카메라 고정봉에 있는 육각 나사를 이용해서 카메라 고정봉을 고정시킵니다.
카메라 고정

울트라 클램프 어셈블리의 나사를 조여서 카메라를 고정합니다.
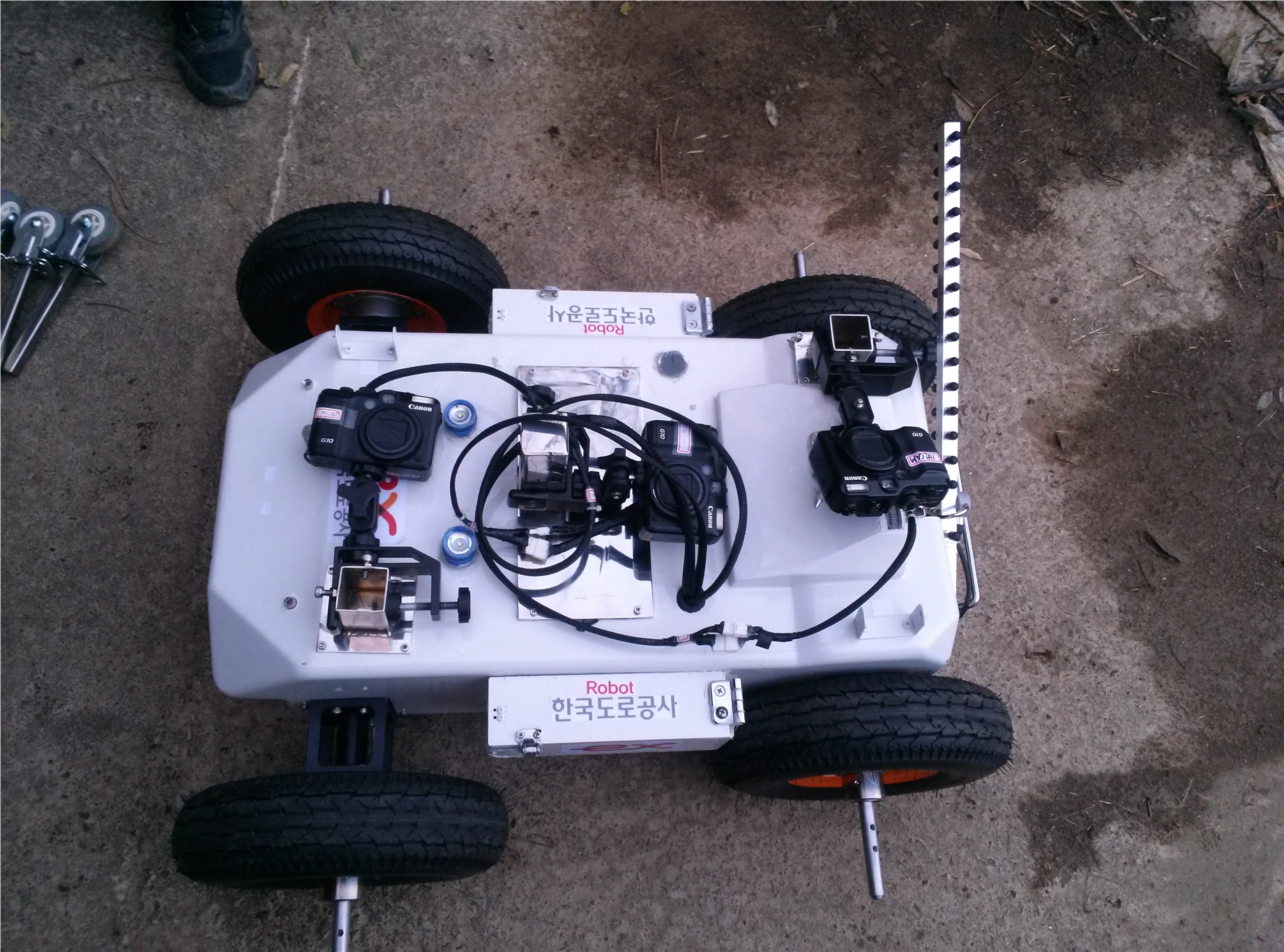
기구물을 조립한 로봇

기구물과 카메라를 조립한 로봇의 모습입니다.
ExRemote App(Android)
앱 다운로드
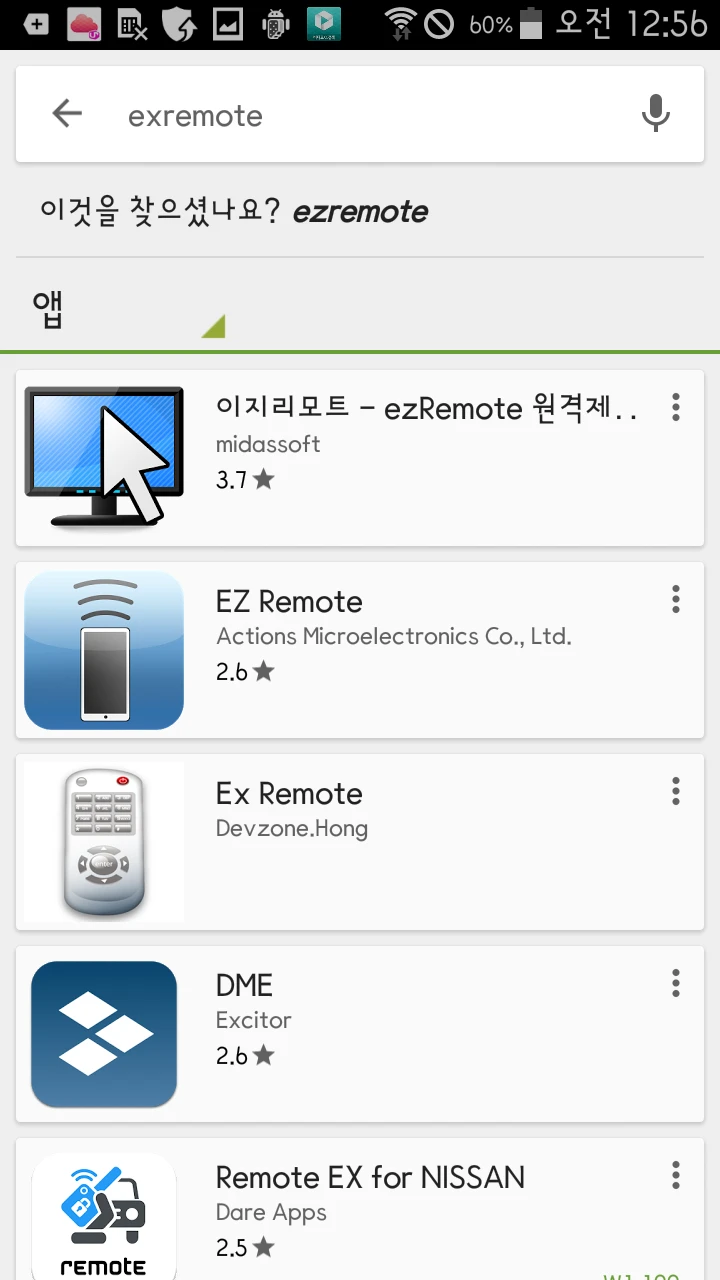
구글 플레이스토어에서 "exremote"라고 검색한 화면입니다. 세 번째 앱을 선택합니다.
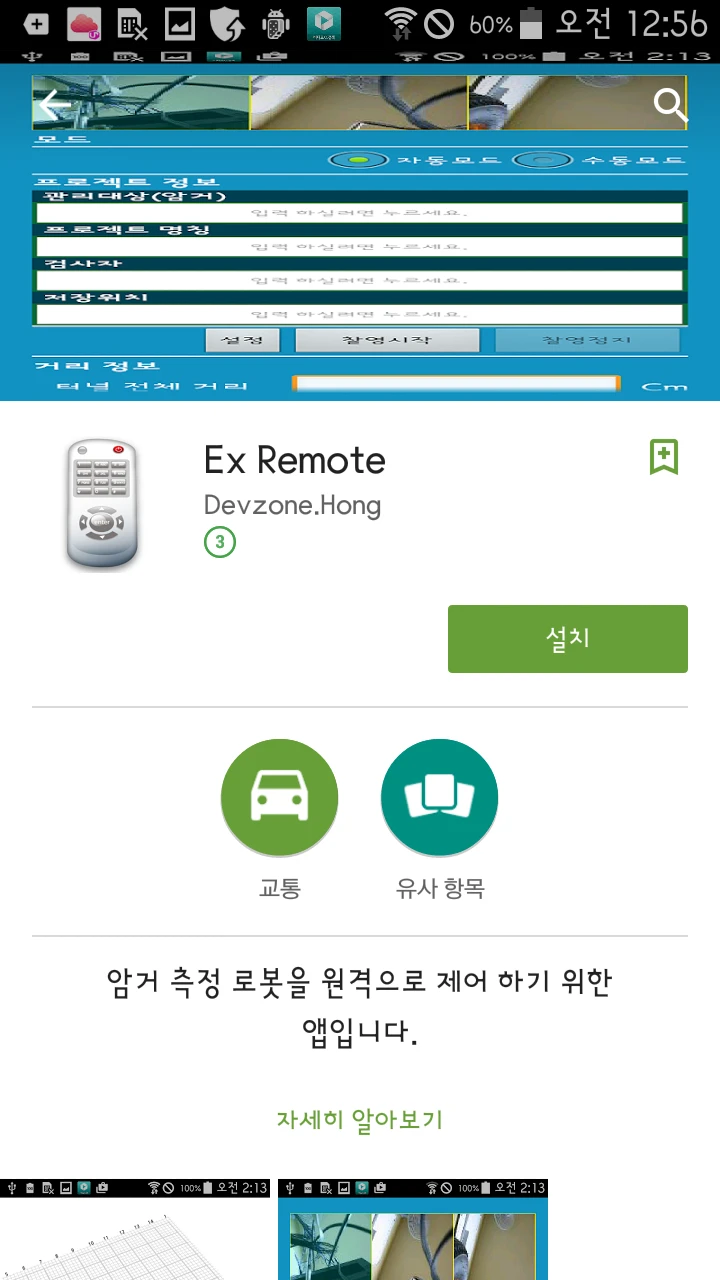
세 번째 앱을 클릭하면 설치화면으로 넘어갑니다. "설치"버튼을 누르면 다운로드 됩니다.
초기 설치 화면
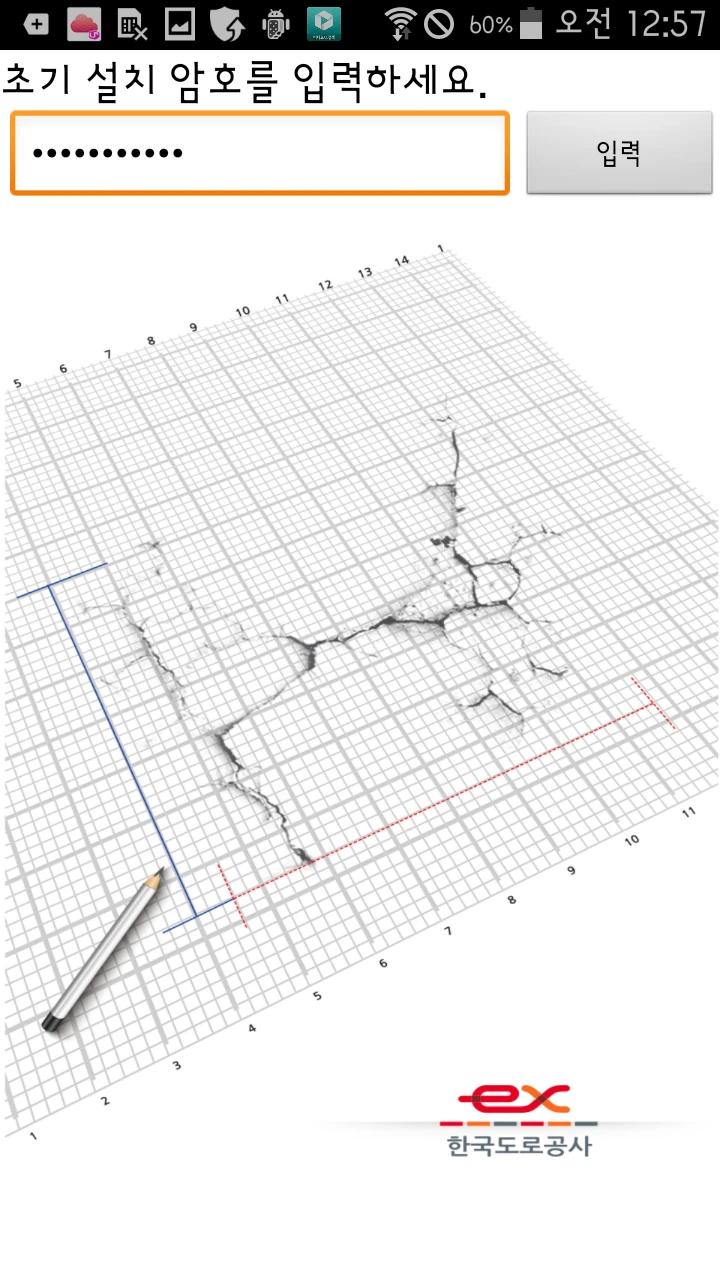
앱을 처음 설치할 때 암호를 입력합니다.
초기 화면
앱을 실행할때 나오는화면입니다.
메인 화면
카메라설정 화면으로 이동하거나프로젝트정보를입력하는 화면입니다.
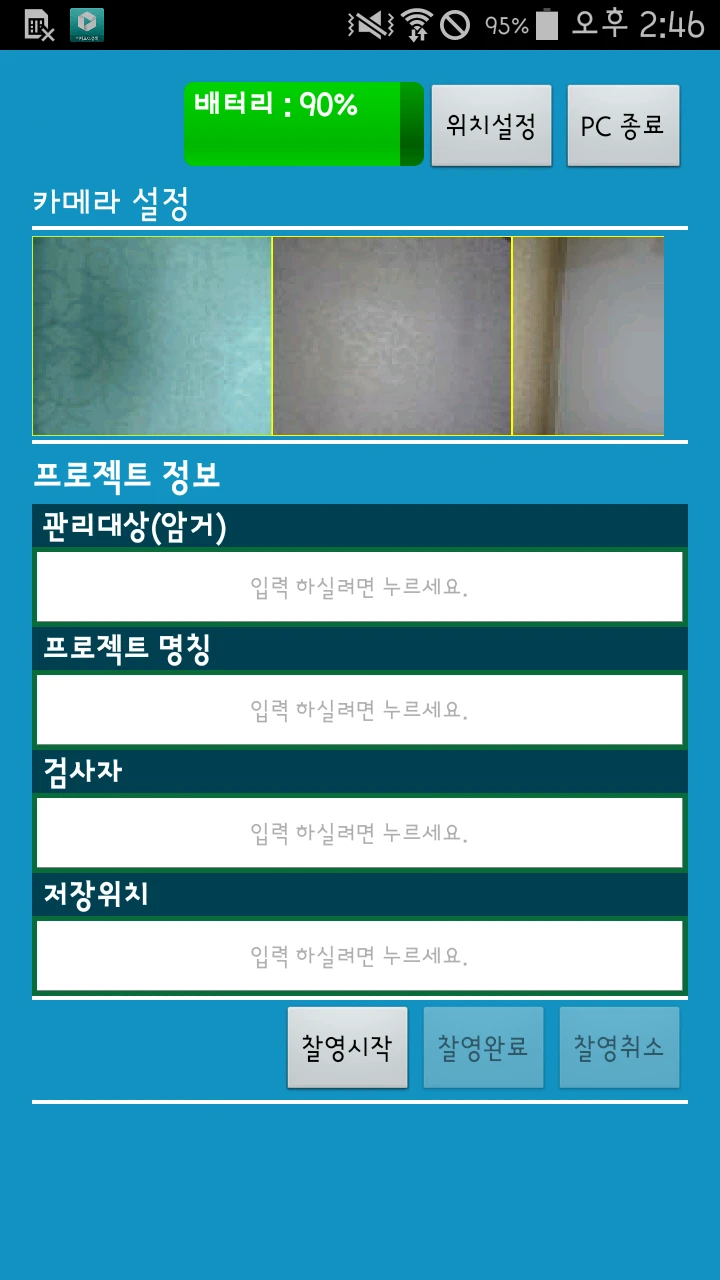
카메라 설정
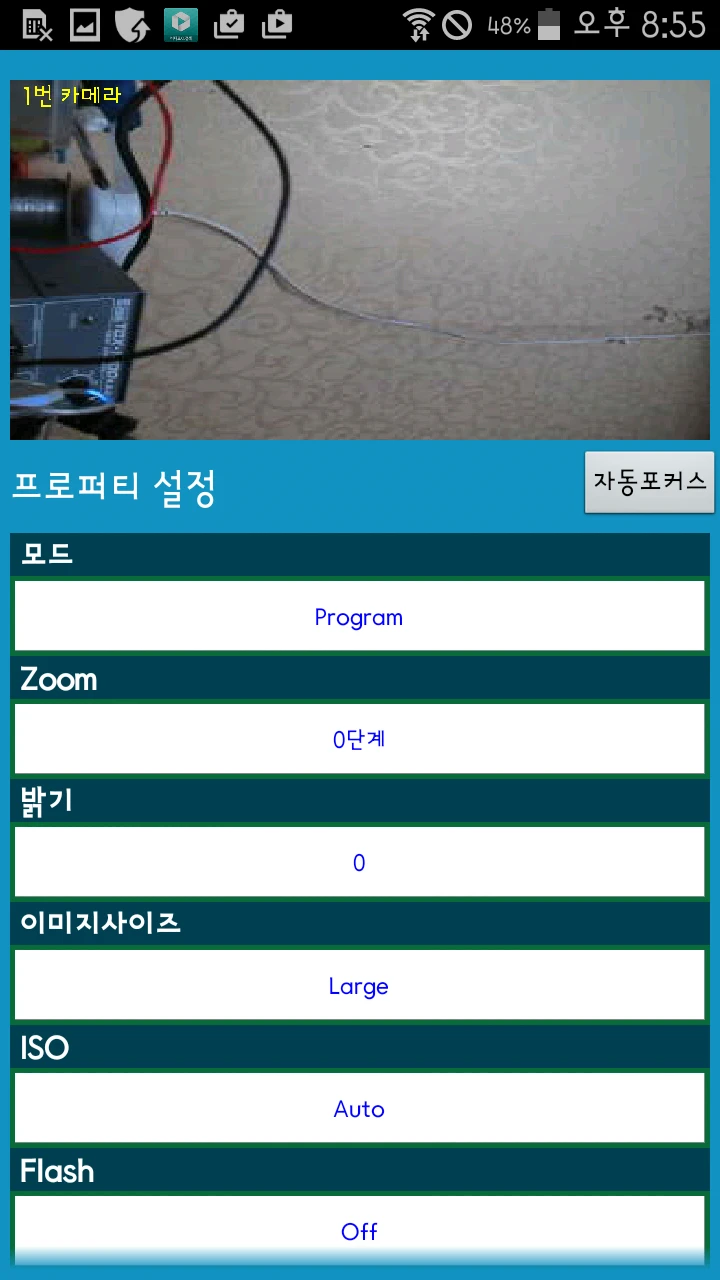
미리보기를 통해서 카메라 설정을 합니다.
로봇 설정
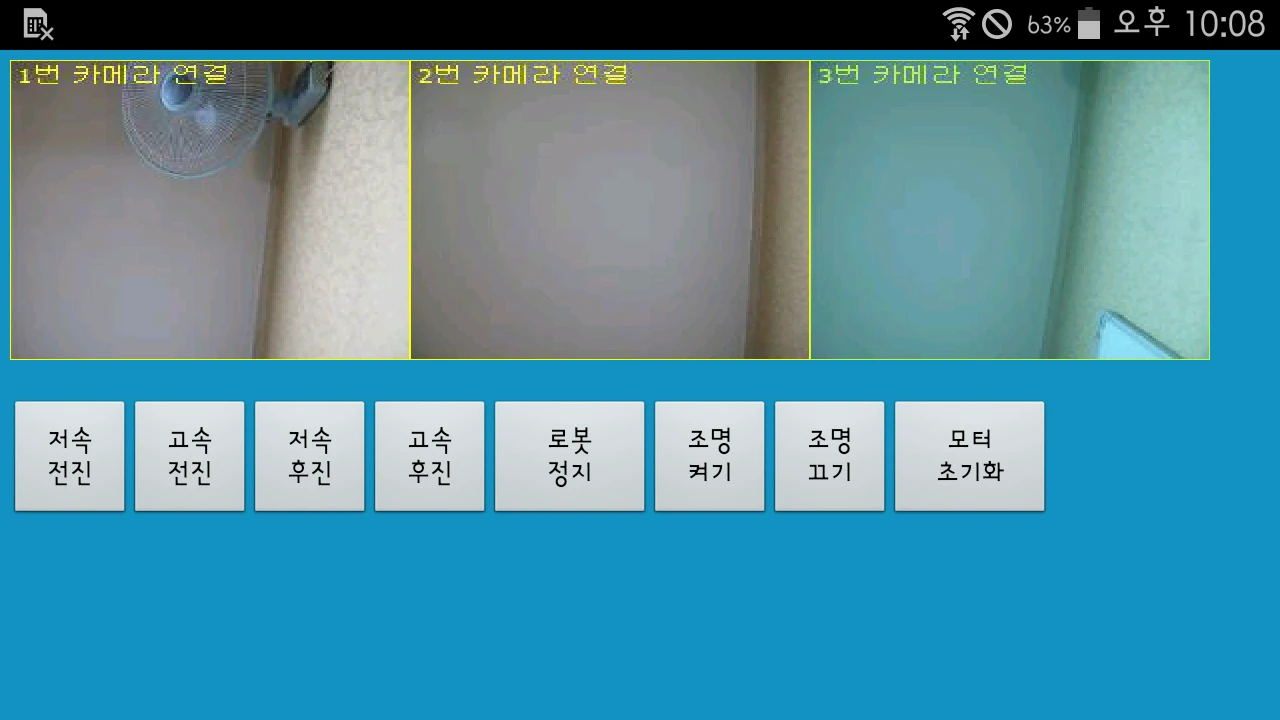
수동으로 로봇에 대한 기능을 설정 합니다.
프로젝트 설정
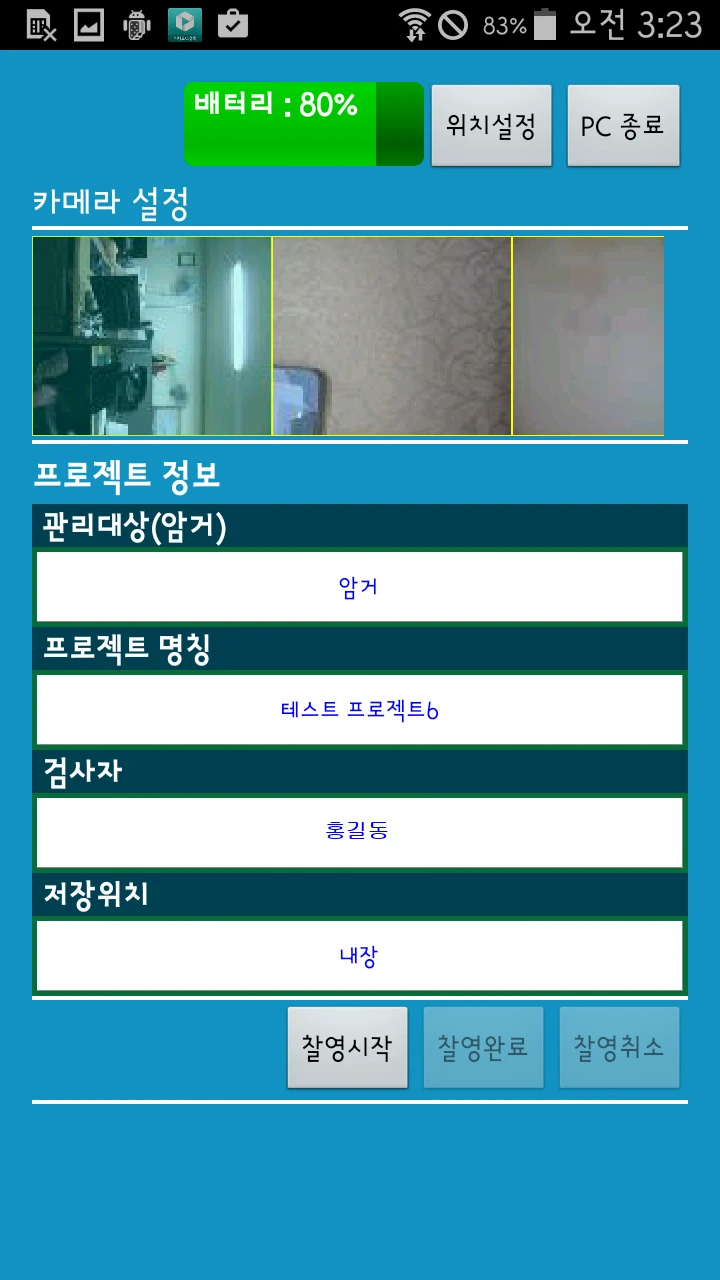
프로젝트를 생성 하고, 암거 찰영을 진행 합니다.
이동 거리와 촬영 횟수설정
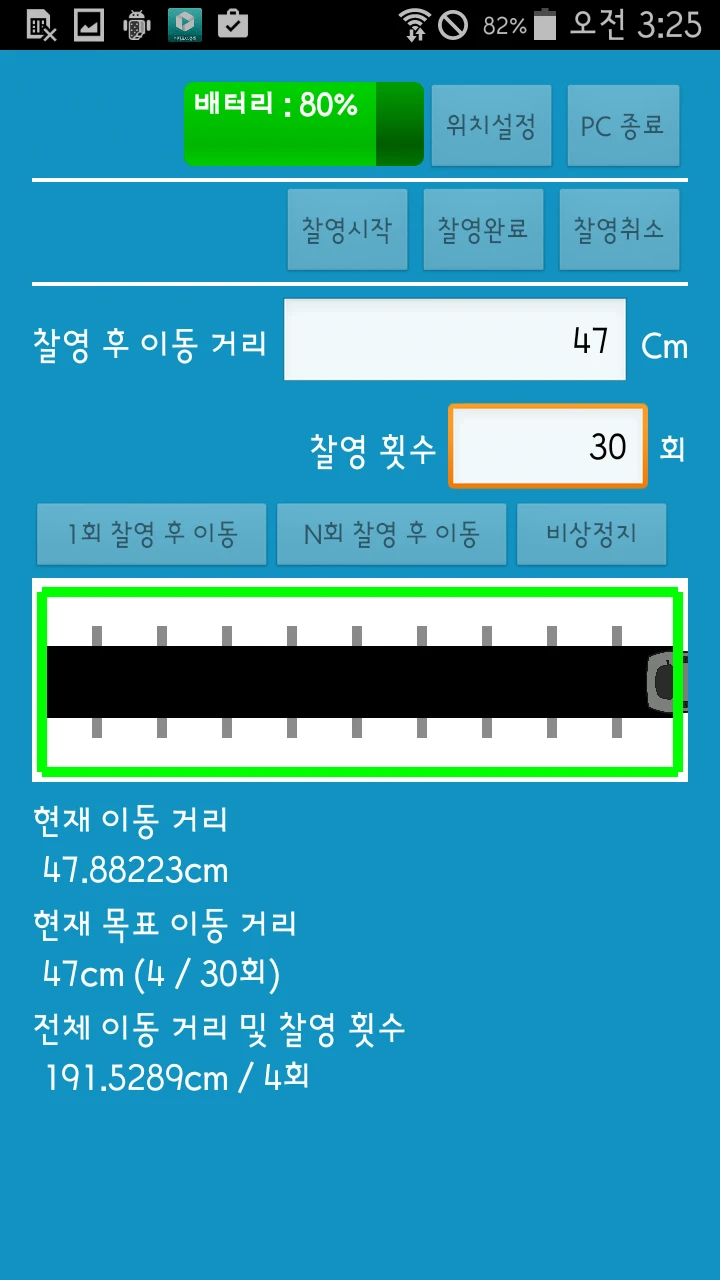
이동횟수와 거리값을 입력하면, 자동으로 이동하여 찰영 합니다.
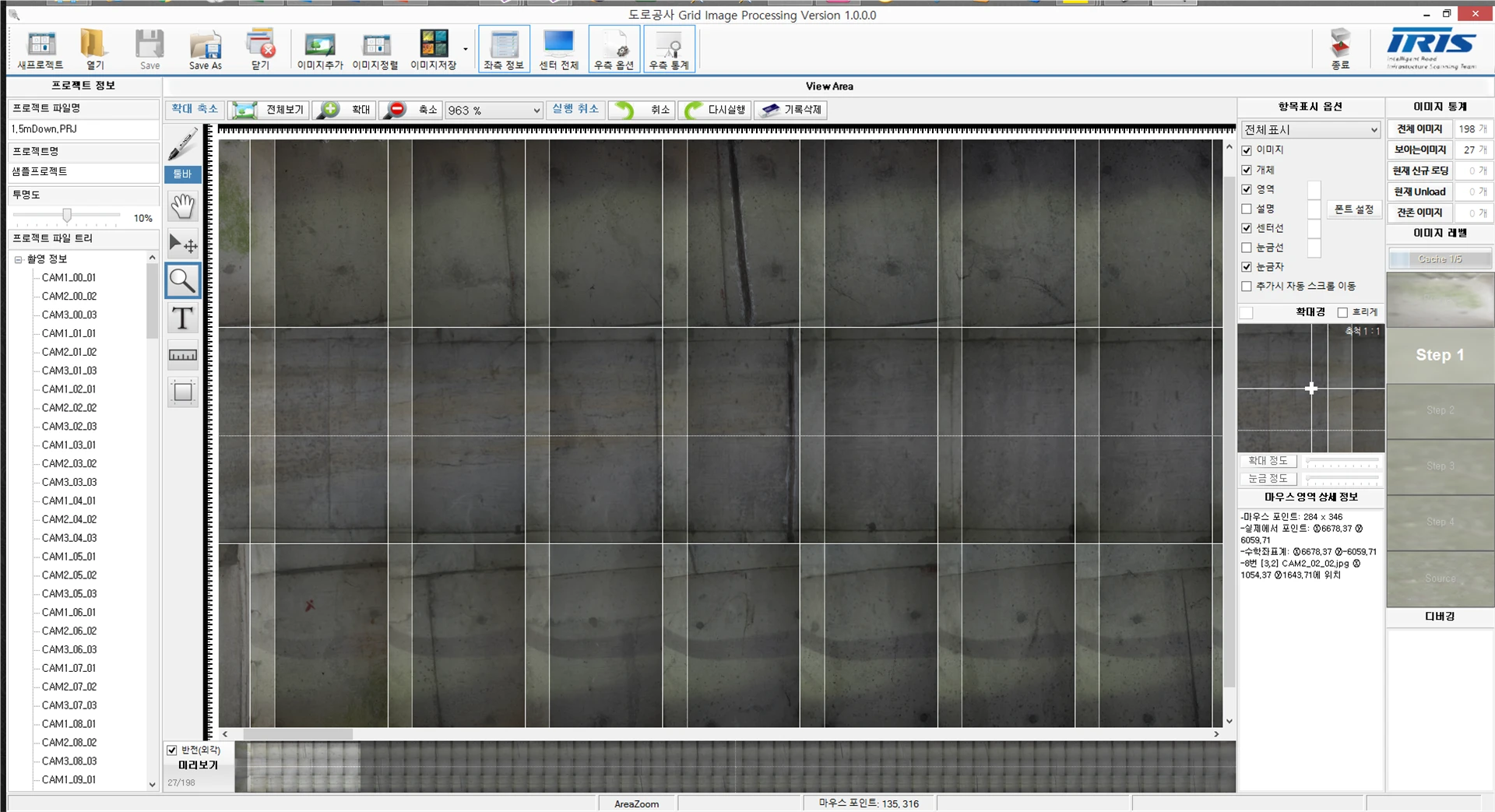
이미지 프로세싱 Software
찰영하여 취득된 프로젝트 파일을 이용하여 이미지 관련 프로세싱 작업을 합니다.
메인화면
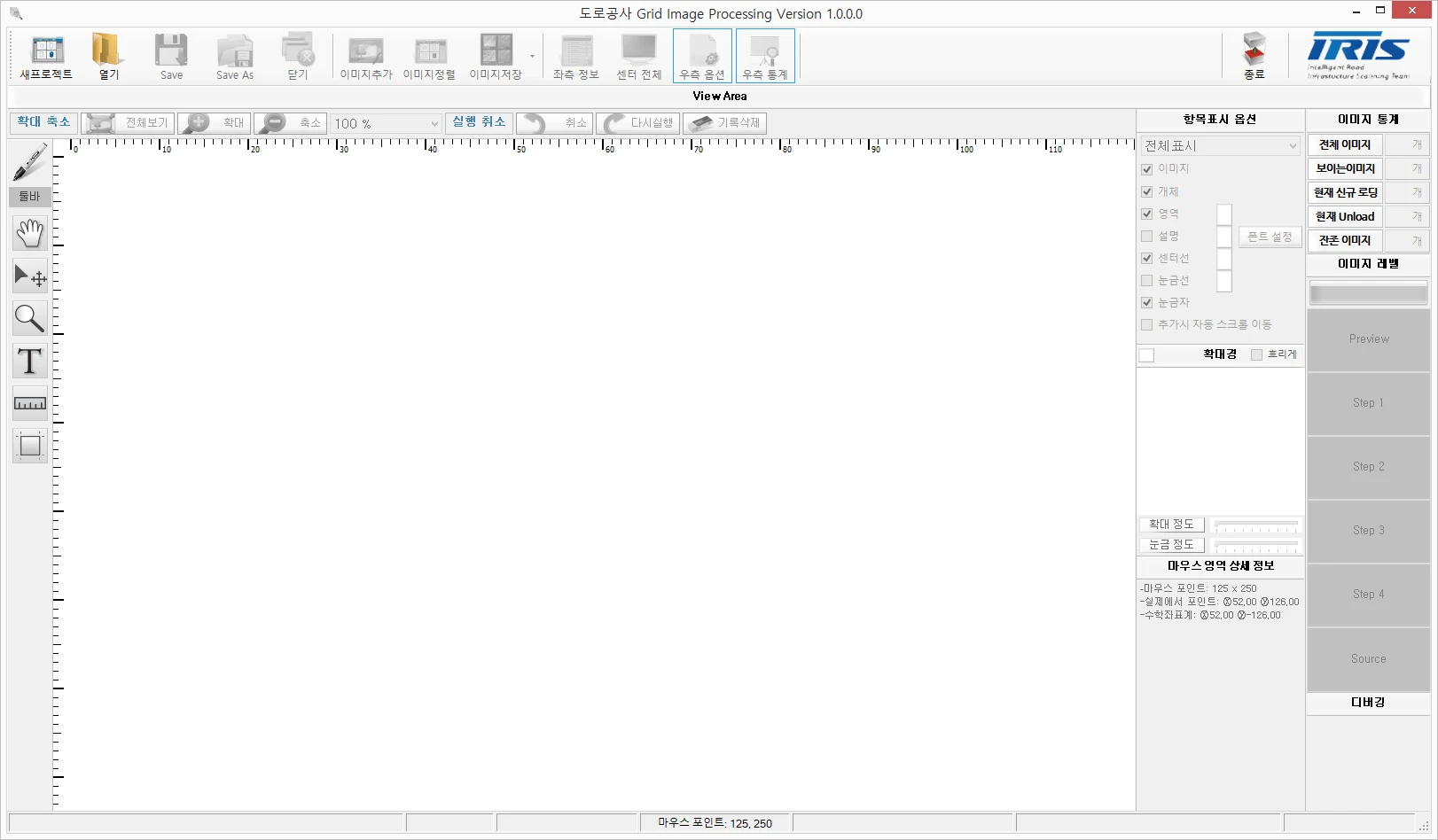
찰영한 프로젝트 정보를 불러와서 작업 합니다.
이미지 추가

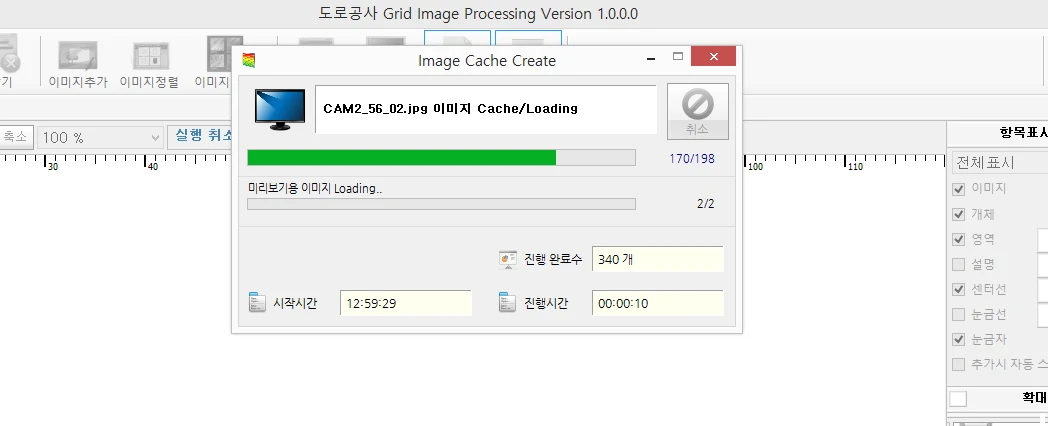
찰영된 정보를 불러옵니다.
이미지 작업
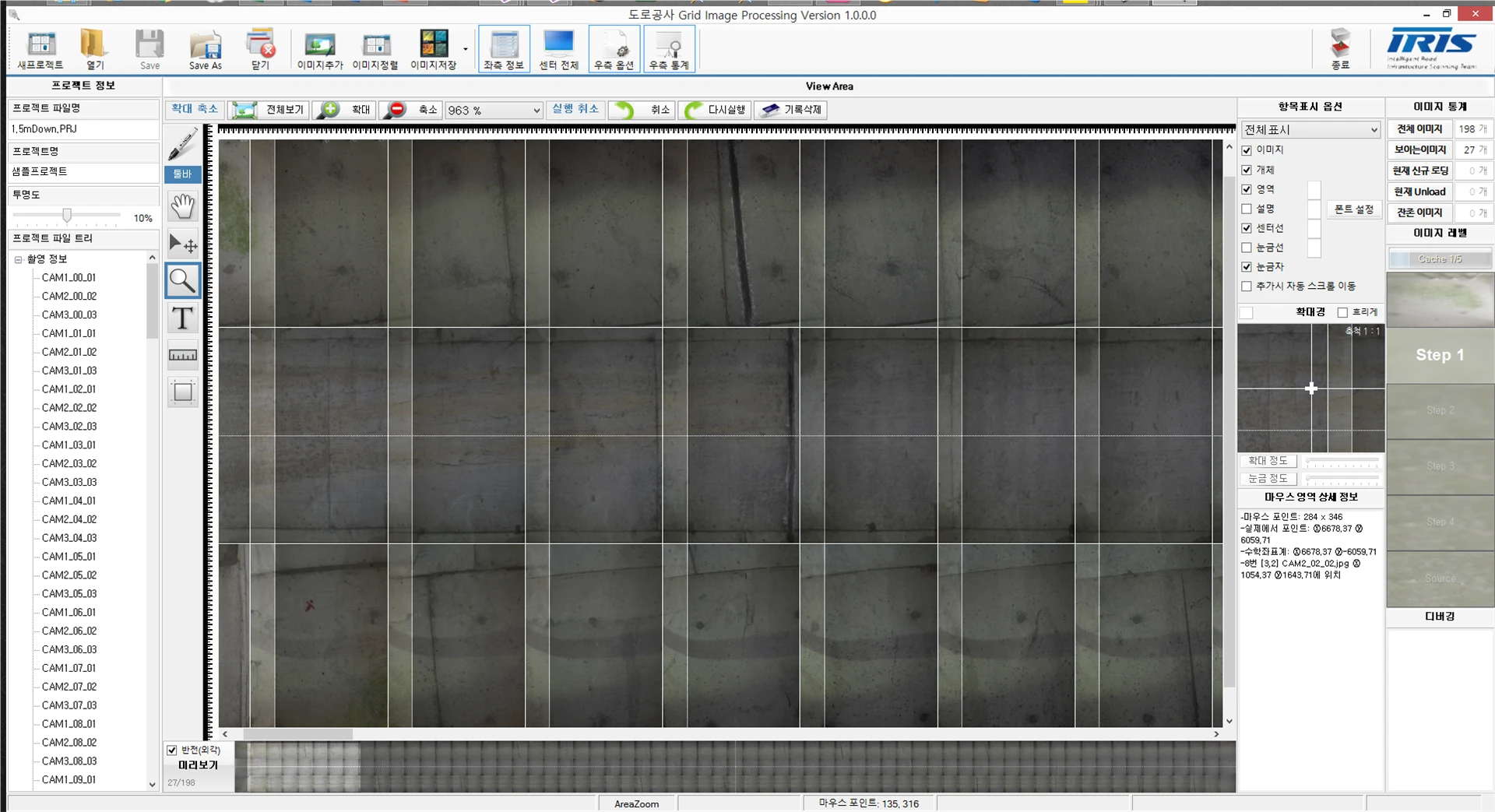
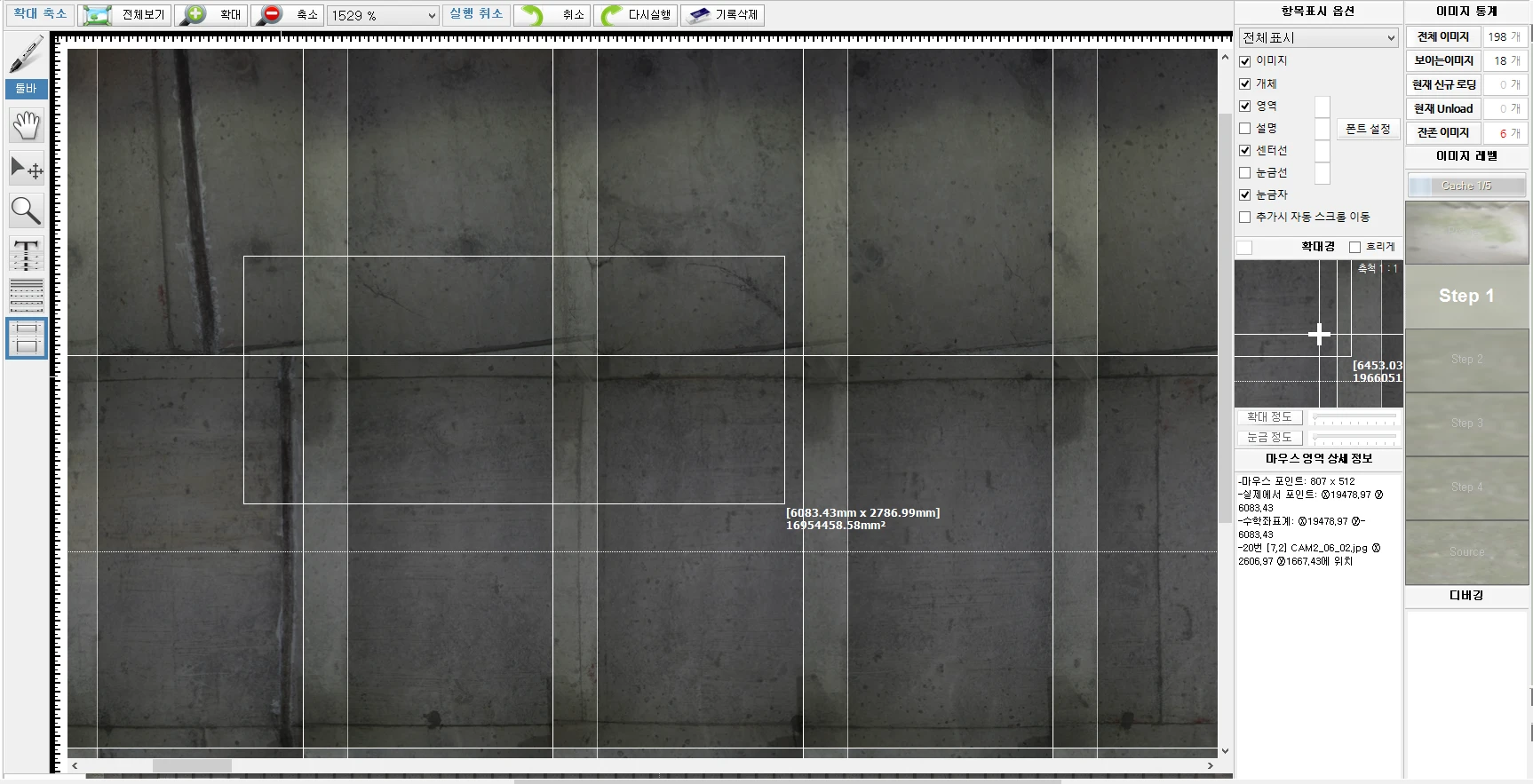
이미지를 불러와서 각종 작업을 합니다.
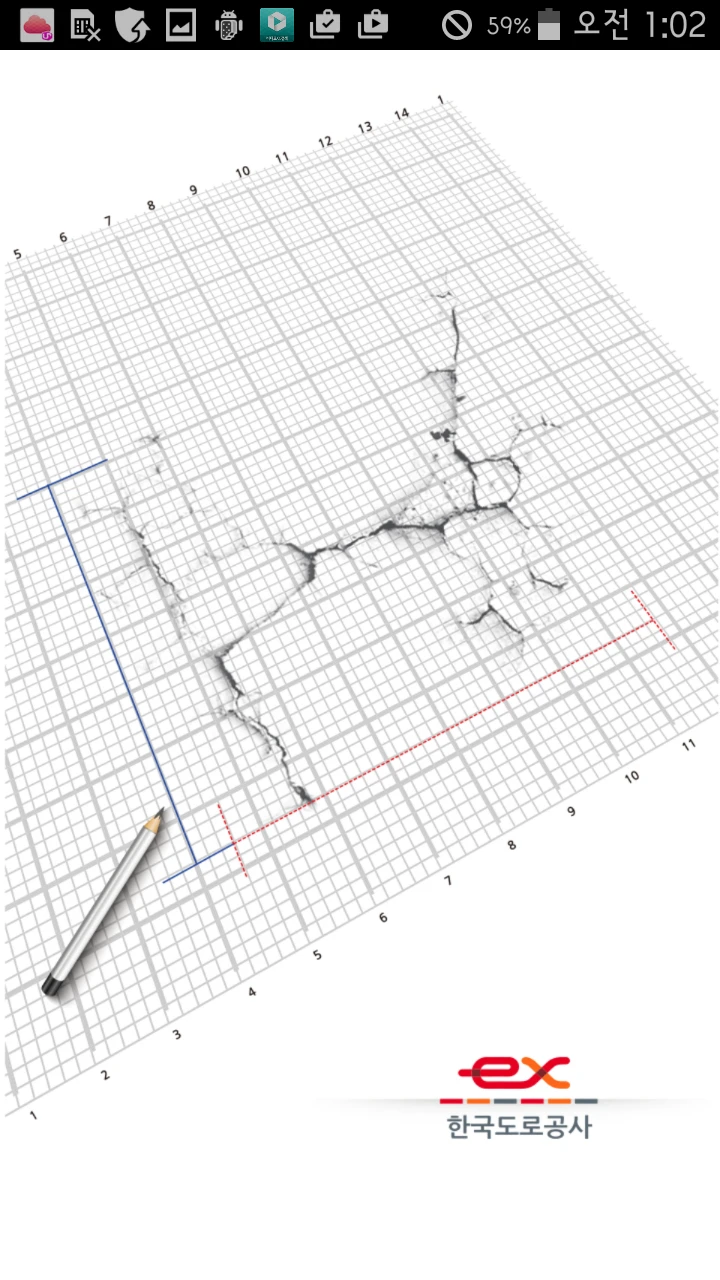
결과 산출물
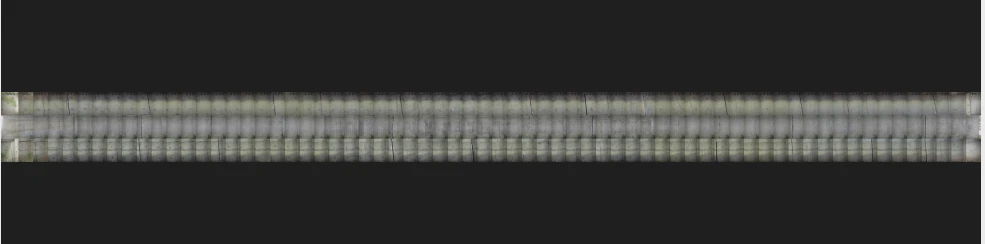
모든 이미지를 병합한 이미지 파일 입니다.
- share :
-


